♪
Movement I. • Sep 2025 to Dec 2025
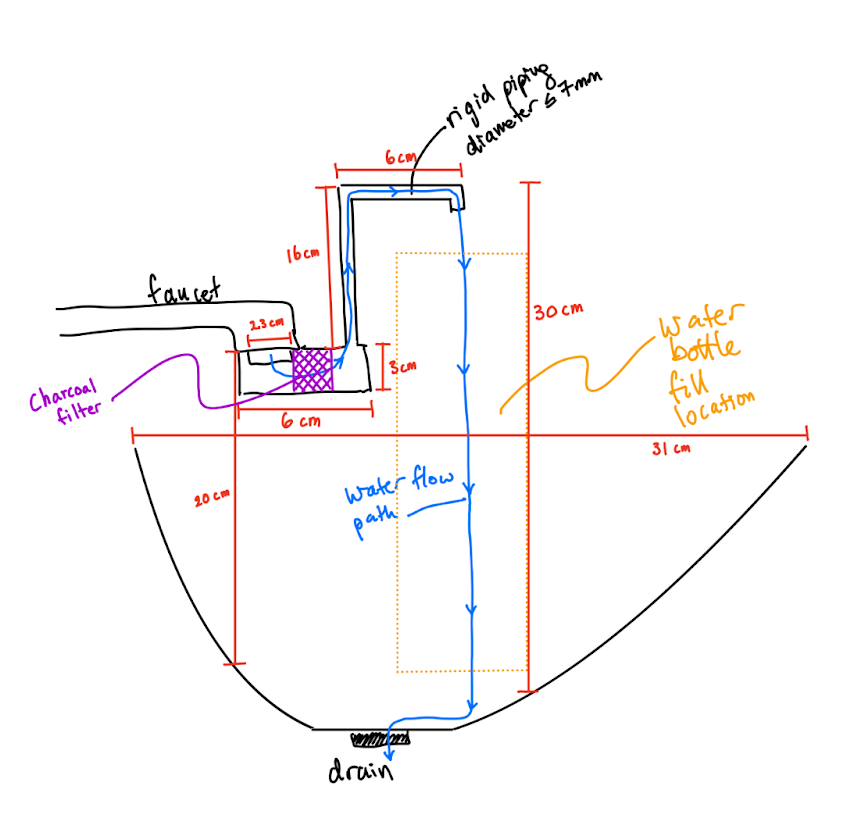
Rigid Pipe Faucet Attachment (Praxis I)
Designed a fluid redirection system solving severe spatial constraints in dormitory sinks through iterative proxy testing.
- Frame: NGO Framework
- Diverge: Morphological Charts
- Converge: Proxy Testing for Validation